ロボット工学者が昆虫の動きからヒントを得ることはよくあるが、足遣いに関しては、昆虫の動きは最適とは限らないとわかった。

3本足もいいけど、2本足の方がもっといい。6本足ロボットを素早く移動させるために、地面と接触させる足の数を決めなら、これが事実だ。
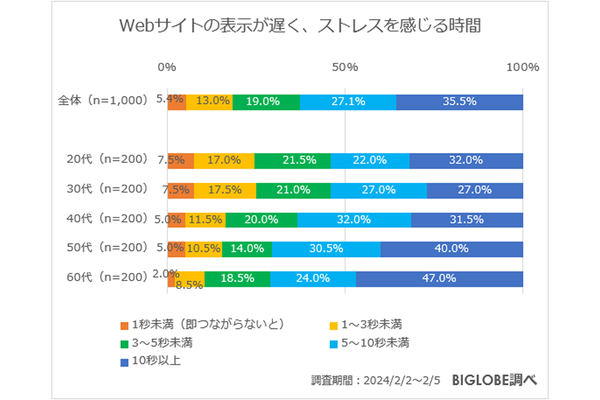
ロボット工学者が歩行方式を検討するとき自然界をヒントにすることはよくある。だからといって、昆虫の動作をそっくり真似るのが最も効率がよいとは限らない。ほとんどの昆虫がちょこちょこ走りまわる時、6本ある足の3つを地面と接触させている。しかし3足歩行になるのは、地面との摩擦を十分保って坂道を登るためだ。2月17日、スイス連邦工科大学ローザンヌ校の研究者がネイチャー・コミュニケーションズ誌に発表した計測結果によれば、平面上では足を2本だけ使った方が、移動速度が速いとわかった。
この理論を、ミバエをモデルにしたロボットで試すと、結果は明白だ。映像では、上側に3足歩行のロボット、下側に2足歩行のロボットが映っているが下側のロボットの方が25%速く動いているのがわかる。悪夢に出てきた昆虫型ロボットに追い回されるとき、ロボットは思ったより動きが早いと覚悟しておこう。
(関連記事:Nature Communications, “DARPA’s Robot Challenge May Equip Robots to One Day Walk Among Us,” “The Latest Boston Dynamics Creation Escapes the Lab, Roams the Snowy Woods,” “Agile Robots”)